这篇教程OpenCV半小时掌握基本操作之角点检测写得很实用,希望能帮到您。
概述OpenCV 是一个跨平台的计算机视觉库, 支持多语言, 功能强大. 今天小白就带大家一起携手走进 OpenCV 的世界. 
角点检测角点检测 (Corner Detection) 是图像的重要特征. 角点可以帮助我们实现图像对其, 图像拼接, 目标识别等等重要用途. 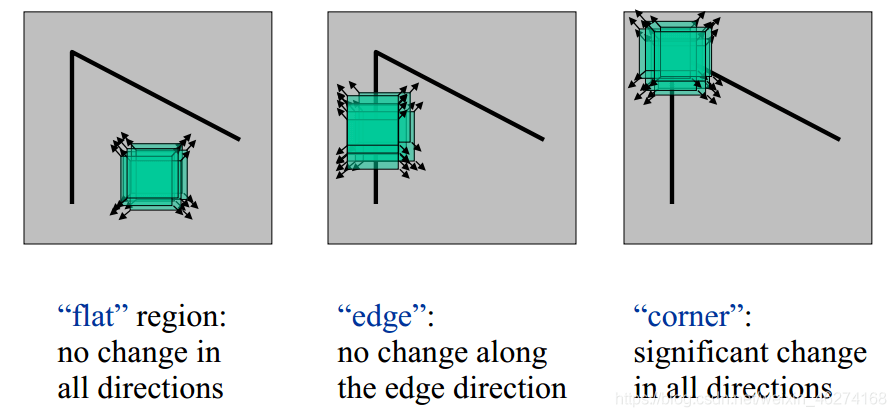
Harris 角点检测 (Harris Corner Detection) 是最基础也是最重要的一种角点检测算法. 通过计算图像在 x, y 上平移的自相似性 (Self-Similarity) 来判断图像是否为角点. 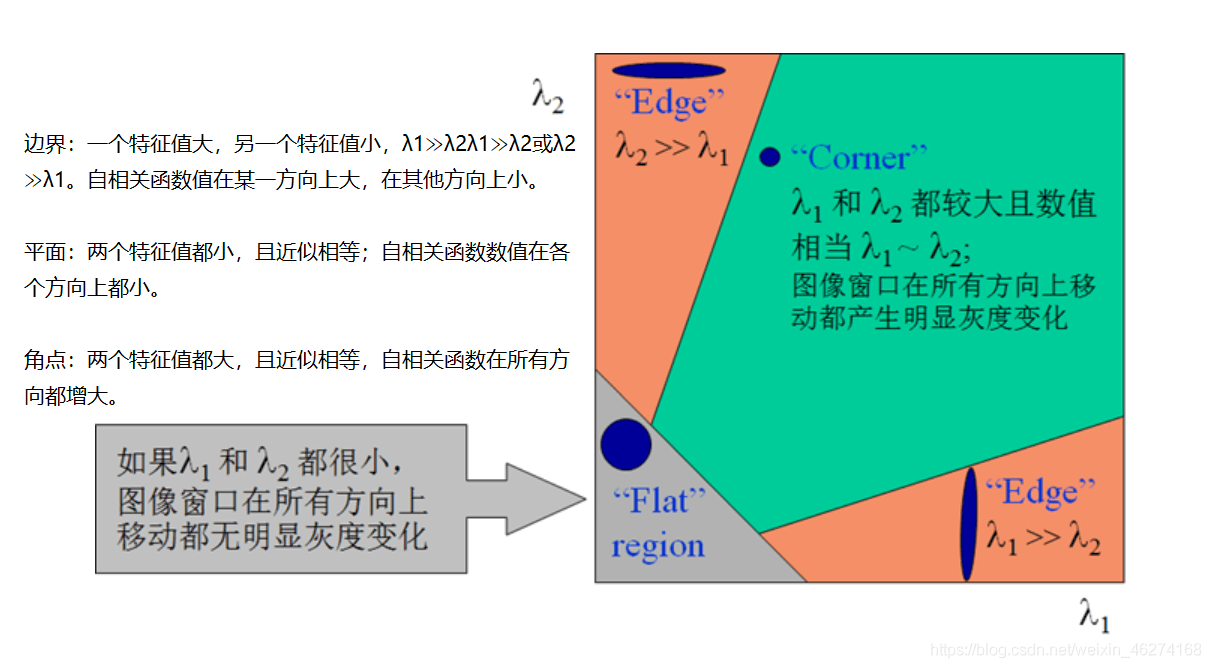
例如: 某图像的某个位置在 x / y 方向上做微小的滑动, 如果窗口内的灰度值都有较大变换, 那么这个位置就是角点.
角点检测代码格式: cv2.cornerHarris(src, blockSize, ksize, k, dst=None, borderType=None) 参数: - scr: 输入图像
- blockSize: 焦点检测中指定区域的大小
- ksize: Sobel 求导中使用的窗口大小
- ksize: Sobel 孔径参数, 取值范围为 [0.04, 0.06]
例1 : import numpy as npimport cv2# 读取图片image = cv2.imread("house.jpg")# 转换成灰度图image_gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# harris角点检测harris = cv2.cornerHarris(image_gray, 2, 3, 0.04)# 阈值转换原图image_corner = image.copy()image_corner[harris > 0.01 * harris.max()] = [0, 0, 255]# 整合combine = np.hstack((image, image_corner))# 图片展示cv2.imshow("origional vs corner detection", combine)cv2.waitKey(0)cv2.destroyAllWindows()# 保存结果cv2.imwrite("harris.jpg", combine)输出结果: 

例 2: import numpy as npimport cv2# 读取图片image = cv2.imread("house2.jpg")# 转换成灰度图image_gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# harris角点检测harris = cv2.cornerHarris(image_gray, 2, 3, 0.04)# 阈值转换原图image_corner = image.copy()image_corner[harris > 0.1 * harris.max()] = [0, 0, 255]# 整合combine = np.hstack((image, image_corner))# 图片展示cv2.imshow("origional vs corner detection", image_corner)cv2.waitKey(0)cv2.destroyAllWindows()# 保存结果cv2.imwrite("harris.jpg", combine)输出结果: 

到此这篇关于OpenCV半小时掌握基本操作之角点检测的文章就介绍到这了,更多相关OpenCV角点检测内容请搜索51zixue.net以前的文章或继续浏览下面的相关文章希望大家以后多多支持51zixue.net!
利用Numba与Cython结合提升python运行效率详解
OpenCV半小时掌握基本操作之SIFT算法 |






